
ハイブリッド NVH モデリング
開発時間の短縮とコスト低減へのニーズがさらに高まっており、重要な設計上の決定を開発の早い段階で行わなければなりません。そこでバーチャル試作へのニーズがますます高まります。シミュレーションとテストを組み合わせることによりさらに開発期間短縮とコスト低減を促進することができます。 また、結果の精度が数値モデルのみ、或いは測定結果のみに基づいたアプローチと比較して向上します。タスクとバーチャル試作を製作する為のデータ準備度合いに基づいた最適アプローチ、物理的現象をモデル化するメソッド、そして物理的な試作を選択することが重要です。開発プロセスが一社で完結せず複数の会社にまたがっている場合は、データと物理的な試作がさらに重要になります。複数の会社がシステムモデルを構築する為に製品の機能を共有する必要があります。しかし、開発ノウハウや製品設計の詳細を共有したがらないかも知れません。
実例
このブログ投稿記事では、例として電動バイクを使用し、測定と数値シミュレーションを組み合わせて NVHの特性を予測・分析することが如何にこれまで述べきたニーズに寄与するかご覧に入れます。
このケースでは、既に量産している電動バイクの電動ドライブユニットを新しい電動バイクの試作の数値モデルにバーチャルに搭載します。

図1:事例におけるハイブリッドモデルの構造
テストベースモデル
電動ドライブユニットの加振と構造ダイナミクスは in-situ ブロックトフォース [1, 3]として知られる 等価力(EFs) メソッドを用いた実験から導出されます。実験的伝達経路解析のソース記述としてご存じかも知れませんが、このような「振動源の入力」をテストケースからシミュレーションモデルに転送するには、これらの力は、受動系(ドライブユニットを支えるアセンブリ)に属するのではなく、純粋にソース(ドライブユニット)の属性である必要があります。
つまり、電気ドライブユニットのin-situブロックトフォースは、プロトタイプや量産モデルの電動バイクに搭載された電気ドライブでも同様であり、発生源と発生源を保持する構造の両方の属性である入力値を実測するのではなく、in-situブロックトフォースが必要なのです。
数値モデル
さらに、ボトムアップ法を用いて電動バイクのプロトタイプの構造ダイナミクスを予測する為の数値モデルを構築します。この場合、ボトムアップ方式という用語は、システムが個別に検証できるいくつかのサブモデルに分割されていることを意味します。すべてのサブモデルについて、詳細レベルと抽象化の度合いは、利用可能なデータと解決したい問題と一致します。数値モデルは、ドライブユニット、バッテリー、フレーム、フォーク、リアスイングアーム、フロントホイール、前後ショックアブソーバーで構成されています。この場合、電動バイクのフレーム、特に下部チューブが最も音響エネルギーを放射すると想定している為、フレキシブルなパーツとしてモデル化する必要があります。
課題の1つは、炭素繊維強化プラスチックで作られたフレームで、さまざまな層の厚さ、配向、材料特性を考慮する必要がありました。バッテリーとドライブユニットも電動バイクの構造ダイナミクスに影響を与えると想定しましたが、これらのコンポーネントに関するデータはありません。そこで、各部品の構造の特性を調べるための予備調査としてモーダル解析を行いました。
ハイブリッドモデル
構造ダイナミクスの数値モデルと、フレームの表面速度から放射を予測するモデルを組み合わせました(図1参照)。これらのモデルにより、電気駆動装置とフレームの間のインターフェースにある様々な励起点から、電動自転車の周りの様々なマイクへの一連の振動音響伝達関数を合算します。数値シミュレーションで予測された振動音響伝達関数と、実測から得られたin-situブロックトフォースを組み合わせることにより電動自転車のプロトタイプの実際の音を予測することができます。
自由にアクセス可能な論文[1、2]では、ハイブリッドNVHモデリングアプローチの予測を測定を通じて検証し、達成可能な予測精度を評価することができました。(図2を参照)

図 2:実測した音圧レベルとシミュレーションした音圧レベルの比較 (a. 実測した量産モデル、b. 計算によるプロトタイプ、c. 実測したプロトタイプ)。
量産モデルの測定では、図2の左側に白い楕円でマーキングされた2つの潜在的に重要な動作状態を特定できます。
最初の動作モードはランアップの途中であり、2番目の動作モードは最後です。数値プロトタイプモデルと実験的に導出された量産ドライブユニットの励起を組み合わせると、最初の潜在的に重要な動作モードがランアップの途中からランアップの最初にシフトすると予測できます。(中央の図2参照) プロトタイプの検証測定(右図2参照)は、私たちが正しかったことを示しています。
知覚と心理音響
人間が音をどのように知覚するかは、多くの場合、オーバーオールの音圧レベルよりも重要です。人間の知覚は音に対するユーザーの期待と実際に知覚される音がどれだけ一致しているかに関係しています。その為、音の「良さ」を一般化することは困難です。しかし、主観テストによって開発され、検証された心理音響パラメータは、トナリティ、ラフネス、ラウドネス等、特定の音響現象に対する人間の知覚を定量化する為の実験的測定において確立されたツールです。
シミュレーションを用いることで、製品化されるよりずっと前の段階で、人間が製品の音響特性をどのように知覚するかを評価することができます。しかし、心理音響パラメータによる数値結果の解析を可能かつ有意義にする為には、高い精度が必須です。幸いなことに、数値計算は継続的に改善されます。何故なら、
・ハードウェアの性能と可用性が向上し、より詳細なモデルが可能になり、
・特定の物理現象をモデル化する為に、より洗練された手法が開発され、
・ハイブリッドモデリングアプローチにより、テストベースのモデルと数値モデルの組み合わせが可能な為、特定のタスクまたはサブタスクに最適なメソッド/モデルをより柔軟に選択できます。
図3では、前章で説明した音圧レベルのみに基づいた解析から、数値結果の心理音響分析が解析内容をどのように向上させることができるがわかります。
図3に示した知覚に基づくトナリティの分析は、図2に示した音圧レベルの分析中に特定された潜在的に重要な動作モードに対応しています。黒で示された量産モデルの測定データは、ランナップの中央(80-85 rpm)にピークを示しており、ランナップの終わりに近づくと最大値まで上昇します。ハイブリッドモデル(赤い曲線)は、試作ではランアップの途中のピークが低速にシフトすると予測しています。試作の測定は、この予測を裏付けています(緑色の曲線)。
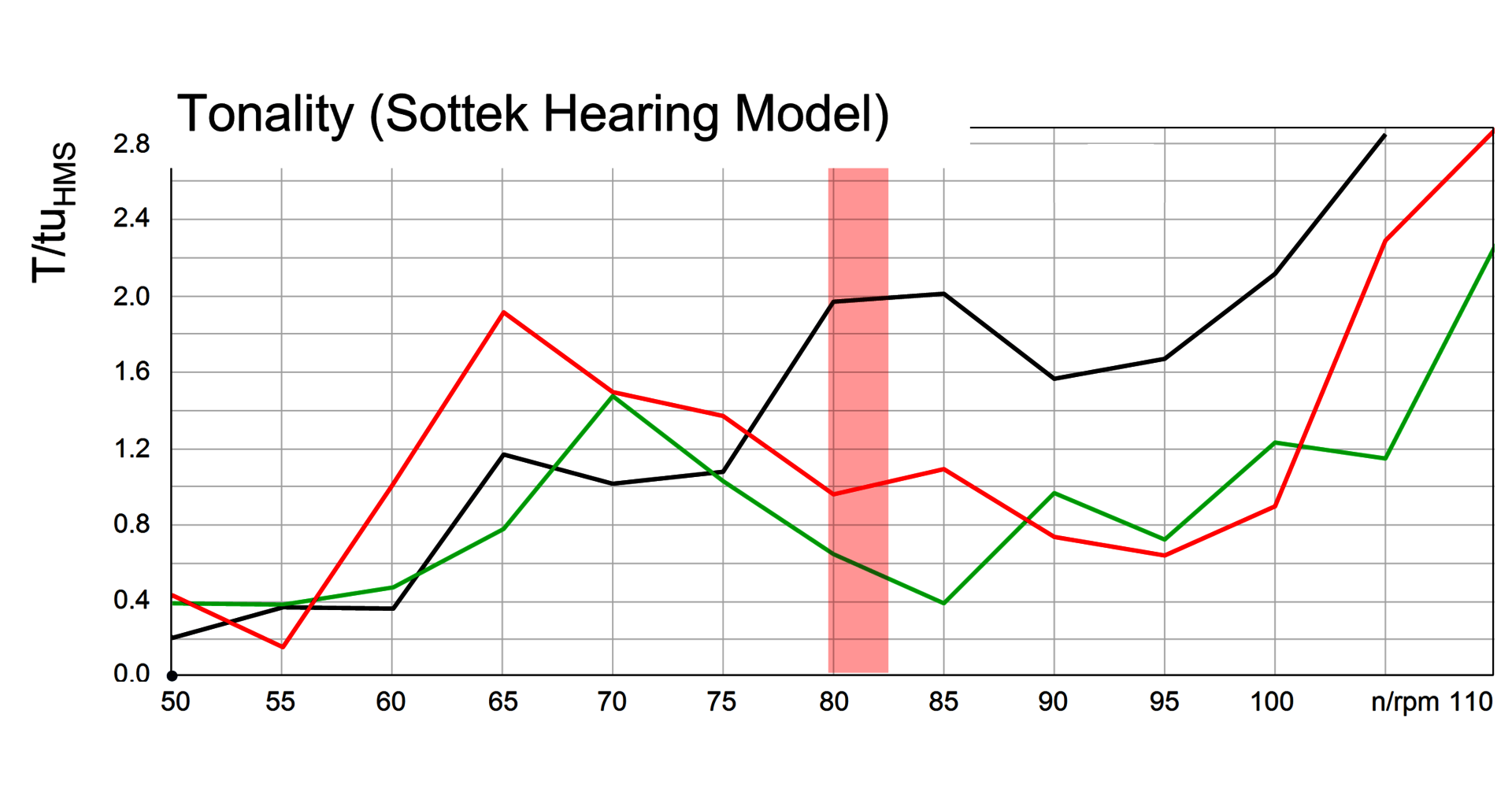
図3 トナリティ聴感印象の比較 (黒: 量産モデルを測定した音; 赤: 試作の音の予測;緑:試作を測定した音) グラフ中の赤いバーは再生できる時間セグメントを示しています。
量産モデルを測定した音
シミュレーションした試作の音
試作を測定した音
これは、私たちが論文[1,2]で提供した結果のほんの一例に過ぎませんが、将来の製品の音響特性を単に想像することから、ハイブリッドNVHモデリングアプローチと心理音響分析を利用して人の知覚を予測分析できるように、大きな一歩を踏み出せるのだということを既に示しています。
試作品として完成する前段階で既に製品の音を聞いたり体験したりすることができ、強力な競争優位が得られます。
出典
[1] M. Wegerhoff, T. Kamper, H. Brücher, and R. Sottek, “Hybrid NVH modeling approach: How numerical and experimental methods complement each other”, Engineering Modelling, Analysis and Simulation, vol. 1, Jan. 2024. https://doi.org/10.59972/4f576ll9
[2] T. Kamper, M. Wegerhoff, H. Brücher and R. Sottek, “Hybrid NVH modeling approach: High quality of NVH results enables psychoacoustic analysis of numerical computations,” Engineering Modelling, Analysis and Simulation, vol. 1, Jan. 2024. https://doi.org/10.59972/pvt6hrtg
[3] M. V. van der Seijs, D. de Klerk, and D. J. Rixen, “General framework for transfer path analysis: History, theory and classification of techniques,” Mechanical Systems and Signal Processing, vol. 68–69, pp. 217–244, Feb. 2016, doi: doi.org/10.1016/j.ymssp.2015.08.004.